
La importancia de las leyes de Newton

Como muchos de vosotros ya sabréis, la mecánica clásica consta de tres áreas diferenciadas: la cinemática, la dinámica y la estática. Se nombran siempre de esta forma porque corresponde al orden lógico de estudio y, además, porque los conocimientos son acumulativos. Esta diferenciación sirve, de hecho, como recurso didáctico, para organizar una materia, física clásica, que se imparte en los institutos. Por eso, cuando llegamos a dinámica, lo primero que aprendemos son las tres leyes de Newton o leyes del movimiento, que dicen así:
1) Ley de la inercia: todo cuerpo se mantiene en su estado de reposo o de movimiento uniforme rectilíneo a menos que se aplique una fuerza sobre él que lo altere.
2) Ley fundamental de la dinámica: el cambio de movimiento es directamente proporcional a la fuerza motriz aplicada, y ocurre según la línea recta a lo largo de la cual aquella fuerza se aplica. En otras palabras, la fuerza aplicada equivale al producto de la masa del cuerpo sobre el que se aplica dicha fuerza y su aceleración, siempre que la masa actúe como constante, Fap = m·a. Si este no es el caso, y la masa no resulta constante, la fórmula más general adopta la siguiente forma: Fap = d(m·v)/dt, donde se incorpora la cantidad de movimiento y la derivada de la velocidad en función del tiempo, que equivale a la aceleración.
3) Principio de acción-reacción: a toda acción le corresponde una reacción del mismo módulo y dirección, pero sentido contrario. Como, por ejemplo, el caso de la normal y el peso, en un plano horizontal. A grandes rasgos, esto es lo que hace que las cosas permanezcan estáticas, cuando no se aplica ninguna fuerza sobre ellas.
Pero debemos recordar que estas tres leyes no solo sirven de base a la dinámica, sino a toda la mecánica clásica, llamada también por esta razón, mecánica newtoniana. De estas tres leyes se deducen la mayoría de las fórmulas aplicables a la cinemática, a la dinámica (también desde el punto de vista energético) y a la estática (por ausencia de movimiento).
Sin embargo, presentan una limitación, y es que solo se pueden aplicar en sistemas de referencia inerciales. Pero, ¿qué son los sistemas de referencia inerciales?
Sistemas de referencia
En primer lugar, la definición formal de sistema de referencia es un conjunto de coordenadas espacio-tiempo que se requiere para poder determinar la posición de un punto en el espacio. Por lo tanto, los sistemas de referencia, desde una perspectiva subjetiva, esta es la del observador, sirven para ubicar un fenómeno físico en su debido contexto, aunque con esta apreciación mía para facilitar la comprensión del lector me esté tendiendo hacia la definición del sistema de referencia físico, distinto en enfoque del inercial.
Este sistema de referencia que, insisto, depende de la percepción del observador, puede hallarse en reposo o en movimiento, y su movimiento, a su vez, puede ser uniforme o acelerado. Ahí radica la diferencia entre un sistema inercial y uno que no lo es. En armonía con la primera ley de Newton, un sistema de referencia inercial se encuentra en reposo o en movimiento rectilíneo uniforme. Por el contrario, uno no inercial se halla acelerado. Claro que este tema puede complicarse sobremanera si profundizamos en él, y nos conducirá irremediablemente a diversos puntos de vista, como la relatividad general o el observador de Rindler o la mecánica lagrangiana, y tendremos en cuenta factores agravantes como el principio extensivo de Heisenberg y así, un no parar… Por eso hago hincapié en que el sistema de referencia puede escogerse arbitrariamente, a elección del observador. Pero siempre optaremos por el más sencillo, ¿no?
Pondremos un ejemplo concreto para ilustrar esto. Si experimentamos el fenómeno de caída libre— no porque nos lanzamos al vacío, por supuesto, sino en un parque de atracciones—, es obvio que nos estamos moviendo, pero podríamos considerarnos inmersos en un sistema de referencia inercial, como matizó Einstein en el principio de equivalencia incluido en la relatividad general que, en palabras sencillas, se traduce en que las propiedades de un sistema no inercial son las mismas que las de un sistema inercial cuando existe un campo gravitatorio. En este caso, la gravedad es una aceleración constante y, como consecuencia, el de caída libre corresponde a un movimiento rectilíneo uniformemente acelerado.
Otro ejemplo, para saber de qué hablamos cuando decimos sistema de referencia inercial, es cuando viajamos a bordo de un tren. Pueden darse tres circunstancias que lo conviertan en un sistema de referencia inercial: 1) que se encuentre parado en la estación, meridiano, 2) que cuando se desplace su velocidad sea constate, por lo tanto corresponde a un movimiento rectilíneo uniforme o 3) que se mueva con una aceleración constante y a nosotros, que viajamos sentados dentro, nos dé la impresión de que no existe aceleración. En todos estos casos existe un denominador común, y es que, nosotros, como observadores en su interior, nos consideramos en reposo relativo.
Ahora imaginemos que, inmersos en el segundo caso, el tren da un frenazo brusco, con lo que nuestro cuerpo es impulsado hacia adelante. Podemos experimentar una fuerza semejante cuando vamos en coche y tomamos una curva: nuestro cuerpo se inclina hacia el exterior de dicha curva, por lo que para equilibrarnos tenemos que ejercer una fuerza en sentido opuesto. En estos casos, nos encontramos clara e indiscutiblemente en un sistema de referencia no inercial.
Así, qué ocurre si nos hallamos en este sistema acelerado, ¿cómo podemos explicar el fenómeno del movimiento que percibimos si las leyes del movimiento conocidas no resultan aplicables? Sencillamente nos inventamos la presencia de una fuerza ficticia que suscita ese movimiento sobre nuestro cuerpo. Esa fuerza que nos impulsa hacia adelante por causa de la aceleración de frenada o hacia atrás por una aceleración positiva o hacia el exterior de una curva, no se debe a la aplicación de una fuerza real sobre nuestro cuerpo, sino que responde a la inercia, que tiende a mantener el movimiento que llevaba nuestro cuerpo antes de producirse el cambio de dirección. Hablamos entonces de una fuerza ficticia o de una pseudofuerza. Con todo, ni la mecánica clásica de Newton ni la física moderna explican las causas y los mecanismos de la inercia. El modelo propuesto por la teoría de la equivalencia global lo hace en el libro de “Física y Dinámica Global” de María José Tiberius Molina— obra que recomiendo a los que deseen profundizar en este tema.
Fuerzas ficticias, pseudofuerzas o fuerzas de inercia
Volvemos al ejemplo del tren, y añadimos, además de la percepción propia del movimiento que puede resultar engañosa— como toda percepción subjetiva—, un acelerómetro improvisado, esto es un péndulo colgando del techo en medio del vagón. Si el maquinista frena con una aceleración constante y permanece así durante unos minutos, observaremos como el péndulo se inclina con cierto ángulo respecto a la vertical, y se queda así, estático. Desde el punto de vista de un observador interno, el pasajero del tren, existen tres fuerzas que actúan sobre el péndulo: el peso, la tensión de la cuerda, y una tercera fuerza dirigida horizontalmente hacia donde se inclina la masa que pende del hilo. Aplicamos las leyes de Newton, para poder explicar este fenómeno, de forma que:


Sin embargo, si por el contrario, fuéramos un observador externo, parados en el andén, veríamos al tren con sus pasajeros y su acelerómetro moverse como un solo sistema. Entonces observaríamos lo siguiente:

Y ahora la fuerza resultante F1’ quedaría:

Lo que hemos hecho ha sido analizar el mismo caso desde dos puntos de vista diferentes. Aunque para ambos observadores, tanto dentro como fuera del tren, ellos mismos permanecían en reposo. Así que, el matiz importante estriba en que ambos creían hallarse en un sistema de referencia inercial, de forma que pudiesen aplicar las leyes de Newton para justificar lo que ocurría físicamente. Pero solo el observador externo, con una perspectiva más amplia de lo que realmente sucedía, podía hacer una distinción, entre su propio sistema inercial y el del tren no inercial. Ahora podemos entender que la fuerza F1 corresponde a una pseudofuerza, también llamada fuerza de inercia, que en realidad resulta de una fuerza que sí es real F1’, del mismo módulo y dirección, pero sentido contrario.
F1’ = –F1
Por eso, la definición para fuerza ficticia que más acertada me parece es la que recoge “Conferencias sobre física” de Richard Feynman: efecto percibido por un observador estacionario respecto a un sistema de referencia no inercial cuando analiza su sistema como si fuese un sistema de referencia inercial. Como la inercia se produce por causa de la velocidad de la masa en movimiento, la definición más precisa para un sistema de referencia inercial es la que propone la mecánica lagrangiana, cuyas fórmulas se pueden aplicar independientemente de que tratemos un sistema inercial o no. Esta dice que un sistema es no inercial cuando la derivada temporal del momento generalizado, no depende de las velocidades.
En este blog, no obstante, a la hora de abordar fenómenos macroscópicos seguimos fiel a la mecánica newtoniana. Por este motivo propongo el siguiente problema:
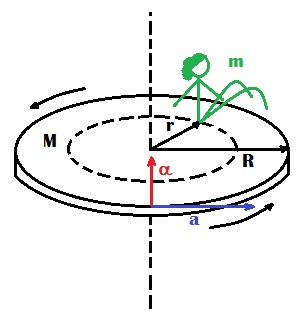
En una de esas atracciones de feria, donde hay una rueda giratoria, tenemos que determinar el radio dentro de la rueda donde se pueden sentar los niños sin que estos salgan despedidos por acción de la fuerza centrífuga (pseudofuerza), lo cual sería muy desagradable de ver. Como indica el siguiente esquema:
Como hemos explicado, la fuerza centrífuga no consiste en una fuerza real, sino que se produce como reacción de otra fuerza, la centrípeta, por acción de la aceleración normal a la dirección de rotación, que sí es real. Aunque a los padres de los niños que salgan despedidos, en efecto, les parezca una fuerza muy real. Para evitar este drama, basta con solucionar este sencillo problema, teniendo en cuenta las siguientes equivalencias de nomenclatura:
ω = velocidad angular, constante, corresponde a la de la masa M
v = velocidad lineal de la masa M
α = aceleración angular = ω2·r = v2/r
R = radio del disco
r = radio máximo para que los niños no salgan despedidos (no deslice)
M = masa del disco
m = masa del niño/a
μe = coeficiente de rozamiento estático
FRe = fuerza de rozamiento estático = μemg
Fc = fuerza centrípeta = M ·(v2/r)
Ahora bien, para que la persona no deslice, ha de darse la igualdad entre fuerza de rozamiento y fuerza centrípeta:
FRe = Fc
Según la tercera ley de Newton resulta que:
mω2r = μemg
Por lo tanto, r < R
r = (μemg)/(mω2) = (μeg)/ω2
De lo que se deduce que la masa m del niño/a es irrelevante, como en el caso de caída libre en ausencia de la resistencia del aire, no existe distinción entre masa inercial y masa gravitacional para cuerpos próximos a masas ingentes como la de un planeta. La conclusión para este caso en concreto es que el radio solo depende directamente del coeficiente de rozamiento de la superficie y de la gravedad, e inversamente de la aceleración angular.
Por lo tanto, si tenemos previsto que la atracción gire a unas 60 revoluciones por minuto, esto es una vuelta cada segundo o, según el sistema internacional, a unos 2π radianes por segundo, el radio máximo donde se pueden sentar los niños sobre una superficie de madera (μe = 0,7) equivaldrá a 10,77 metros.
